Čtyřkolový podvozek s koly Mecanum Omni
Tato verze pohonu byla, jak Kamil postupně přibýval na hmotnosti, zavržena. Ukazuje ale možnosti kol Mecanum Omni, třeba u nějakého menšího, lehkotonážního sporťáku.
Nejprve jsme začali experimentovat se dvěma poháněnými koly a jedním kolem pomocným, což vyhovovalo do doby, než se na podvozek a přidanou nástavbu už nevešlo více komponent. Pak nastoupila pilka, vrtačka, překližka, české matičky, šroubky a hřebíčky.
"A taky Herkules", připomíná svou aktivitu známé lepidlo. 
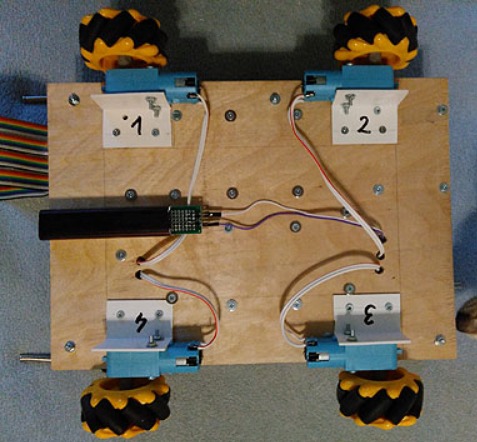 Podvozek robota má rozměr 30x20 cm a byl v jedné z překonaných verzí vybaven koly Mecanum Omni. Tato kola umožňují jezdit do osmi směrů bez nutnosti mechanicky je natáčet. Podle návodu je třeba kola nasadit na zálkadě jejich označení L nebo R na správnou stranu podvozku. Musíme však upozornit na skutečnost, že v prvním případě zakoupená sada obsahovala 3 kola s L a jedno s R. Po reklamaci jsme zjistili, že sice máme správnou sadu kol, ale pro jejich fungování je značení kol nesprávné. Teprve, když jsme kola nasadili bez ohledu na označení podle ukázkového videa na YouTube, začalo to správně fungovat.
Podvozek robota má rozměr 30x20 cm a byl v jedné z překonaných verzí vybaven koly Mecanum Omni. Tato kola umožňují jezdit do osmi směrů bez nutnosti mechanicky je natáčet. Podle návodu je třeba kola nasadit na zálkadě jejich označení L nebo R na správnou stranu podvozku. Musíme však upozornit na skutečnost, že v prvním případě zakoupená sada obsahovala 3 kola s L a jedno s R. Po reklamaci jsme zjistili, že sice máme správnou sadu kol, ale pro jejich fungování je značení kol nesprávné. Teprve, když jsme kola nasadili bez ohledu na označení podle ukázkového videa na YouTube, začalo to správně fungovat.
Kola poháněly TT motory (DC 3-6V), ty ale byly, při napájení 5V a hmotnosti robota 3,5 kg, na hranici svých možností. U Mecanum Omni kol záleží na podkladu, po kterém jezdí. Kola jsou sestavena z malých, soudkovitých, poměrně tvrdých válečků a nemají s podložkou příliš velkou dotykovou plochu. Při jízdě vpřed, vzad a při jízdě kolmo do stran, když jsou v trakci všechna čtyři kola, problémy nejsou. Ty mohou nastat v případě pohybu šikmo do stran, kdy jsou v záběru kola jen dvě. Nejvhodnějším povrchem se pak jeví krátkovlasý koberec a hlavně méně hmotný stroj.