Podvozková vana
Osazení podvozkové vany jednotivými moduly je následující:
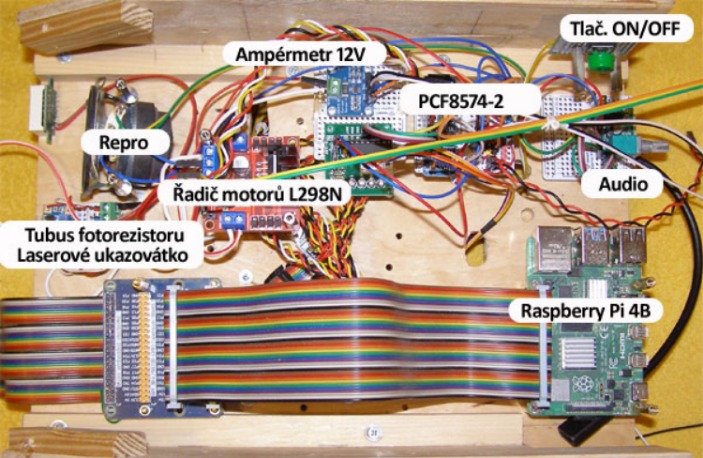
- V prvé řadě je zde nainstalován mozek Kamila - jednodeskový počítač Raspberry Pi 4B. Jeho 40ti pinový port je plochým kabelem spojen s rozbočovačem, odkud vede plochý kabel na venkovní "slepý" konektor (pro případné napojení na nepájivé kontaktní pole), svazek 2-4 pinových káblíků na desku UPS X728 a plochý 40ti pinový kabel nahoru do těla robota (kabel není na fotografii připojen).
- Vpravo nahoře je tlačítko pro zapnutí a vypnutí robota. Tlačítko je připojeno ke konektoru desky X728. Vypnutí nastane až po stlačení tlačítka na dobu cca 14 vteřin.
- Pod tlačítkem se nachází stereofonní audiozesilovač a potenciometr regulace hlasitosti s vypínačem. Hlasitost lze SW ovládat.
- K levému kanálu stereozesilovače je připojen reproduktor směřující vpřed. Pravý kanál je připojen k A/D převodníku, a může být použit jako zdroj řídících impulzů.
- Dále je na desce, v místě popisku, tubus s fotorezistorem pro navádění robota na světelný zdroj, souose s ním je laserové ukazovátko, které lze SW ovládat. Tubus na fotografii není, v době pořízení snímku byl umístěn na podvozku, z druhé strany překližky.
- K dispozici je ampérmetr napájecího napětí motorů 12V.
- Je zde řadič motorů L298N, který je čtyřmi vodiči připojen k expandéru PCF8574 s I2C adresou 0x22 (PCF8574-2).