Modul Pan-Tilt HAT
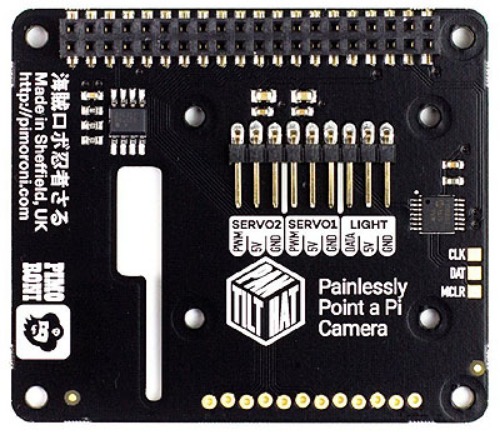
Deska s elektronikou modulu Pan-Tilt HAT řídí práci dvou servomotorů hlavy, které Kamilovi umožňují otáčet a kývat hlavou. Kamil dostal již hotový modul (viz obrázek) osazený dvěma servomotory, držákem kamery a osvětlovacích LED diod (řízení svitu diod není u Kamila použito). Deska s elektronikou je umístěna dole v těle robota. 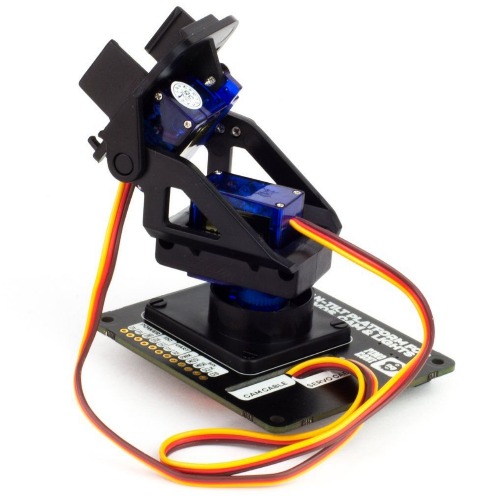
Do držáku, určeného původně pro kameru, je připevněna hlava robota. Protože je podstatně těžší než kamera, a její těžiště je posunuto vpřed, má hlava tendenci sklápět se dopředu přes převody servomotorů. Pro vyrovnání této nestability jsou na distančních sloupcích, které drží hlavu v držáku, našroubovány další distanční sloupky jako protizávaží.
Deska s elektronikou používá ke komunikaci sběrnici I2C a je osazena i 40ti pinovým konektorem pro připojení přímo k
Raspberry. U Kamila ale využíváme samostatných pinů pro napájení 3.3V, 5V a GND, SDA a SCL.
K ovládání Kamilových servomotorů máme v Pythonu knihovnu "pantilthat"