Řadič motorů H-bridge L298N
Řadič motorů H-bridge L298N umožňuje řídit jeden krokový motor, nebo, jako v případě robota Kamila, dva DC motory. Pro zprovoznění modulu je třeba připojit ke svorkám "Output A" jeden z motorů, ke svorkám "Output B" pak druhý motor. Polaritu zatím neřešíme. Pokud se některý motor bude otáčet na druhou stranu než potřebujeme, můžeme vodiče ve svorkách prohodit, nebo pro změnu směru otáčení jednoduše upravíme zdrojový kód programu. Z dvojice pinů "A Enable" a "B Enable" odstraníme propojovací můstky a krajní piny připojíme na GPIO piny Raspberry, protože tyto piny umožňují použít k řízení výkonu motorů systém pulzně šířkové modulace PWM (Pulse Width Modulation). Čtyři piny "Input" by se daly rovněž připojit ke GPIO pinům Raspberry, protože ale nepotřebují speciální přístup, jako v případě připojení "A Enable" a "B Enable", jsou připojeny k modulu expanderu PCF8574, kterým se dá počet GPIO pinů zvýšit o 8. Tak můžeme ušetřit GPIO piny na Raspberry pro "chytřejší" použití. Na závěr připojíme na zbývající svorky napájecí napětí motorů 12V, zem (GND) a napájení logiky 5V.
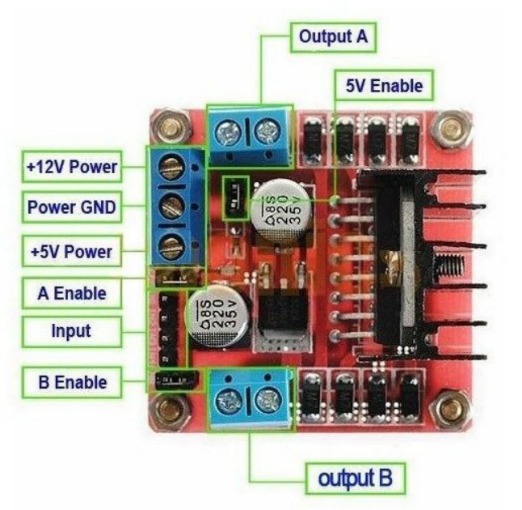
Zapojení:
IN1, IN2 - řízení motoru 1
IN3, IN4 - řízení motoru 2
ENABLE A - aktivace motoru 1
ENABLE B - aktivace motoru 2
OUT1, OUT2 - připojení motoru 1
OUT3, OUT4 - připojení motoru 2
+12V - silové napájení obou motorů
+5 V - napájení logiky modulu
GND - zem
Vlastnosti:
Double H bridge driver L298N
Logické napětí: 5V
Napětí pro motor(y): 5V-35V
Proud logiky: do 36mA
Proud na kanál: trvale 2A s chladičem (3A max.)
Max. výkon: 25W
Rozměry: 43x43x27 mm
Hmotnost: 26 g