Rtuťový spínač
Základním použitím rtuťových spínačů je snímání orientace vzhledem ke gravitaci nebo jako součást detektorů, které hlídají, že se s předmětem nehýbe. Dnes je sice můžeme nahradit elektronickými čidly náklonu a zrychlení, vždy ale s podpůrnými elektronickými obvody.
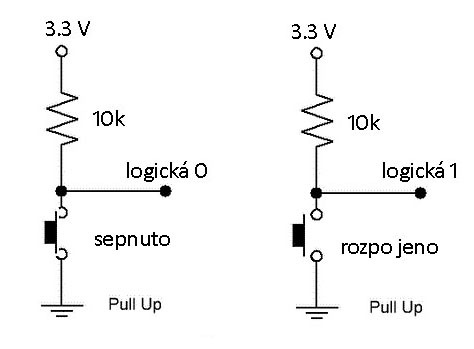
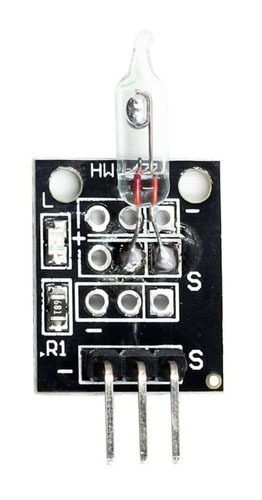
Rtuťový spínač je jednoduché zařízení, které pomocí kapky elektricky vodivé rtuti, uzavřené ve skleněné trubičce s kontakty, umožňuje signalizovat dosažení nastavené meze náklonu. Baňka se rtutí má delší ohebné nožičky, kterými je ji možné nastavit do potřebné polohy. Pokud máme rtuťový snímač zapojit do logického obvodu, musíme, stejně jako u tlačítka, ošetřit neexistenci jednoho ze stavů 0 - 1, protože u nesepnutého spínače je jeden vodič "ve vzduchu" - nikam nepřipojený.
Kamil má jeden pól spínače připojený k zemi (GND), takže při sepnutí kapkou rtuti bude na druhém pólu logická 0. U nesepnutého snímače tedy potřebujeme mít stav logické 1. To vyřešíme připojením snímače k pull-up rezistoru (viz. obrázek).
Robot Kamil má rtuťové spínače KY-017 hned dva (jen proto, že mi ležely v šuplíku). Jeden pro velký náklon dopředu a druhý pro náklon na levý bok. V podstatě ale jde jen o takovou legrácku, kdy Kamil při velkém náklonu předstírá, že byl unesen, volá o pomoc a hrubě spílá únoscům. Neumím si představit situaci, která by jinak vedla ke spuštění poplachu. Čivava hmotnosti 1,5kg robota 3,5kg neporazí, ten do výšek neleze a před schody ho musím uhlídat ručně, protože pak už by asi určitě, jsa rozložen na prvočinitele, nefungoval.